

IPOPT和SNOPT均可,IPOPT是纯开源C++项目,而SNOPT最初是用FORTRAN开发的,现在也提供C++接口,不过是付费软件包。
公司买了nag,感觉效率挺高,就是调用函数都是c的风格,要花一些时间写c++的wrapper
G2o在很多环境中都能使用, C++,python,android,java等。
由于orb_slam是用C++写的,所以使用了g2o的C++版本。
不过,无论哪种版本,基本使用逻辑都相同。
https://github.com/RainerKuemmerle/g2o/tree/pymem/python
看一个例子:https://github.com/RainerKuemmerle/g2o/blob/pymem/python/examples/ba_demo.py
本例子中,直接用g2o的SparseOptimazer来解决BA问题:
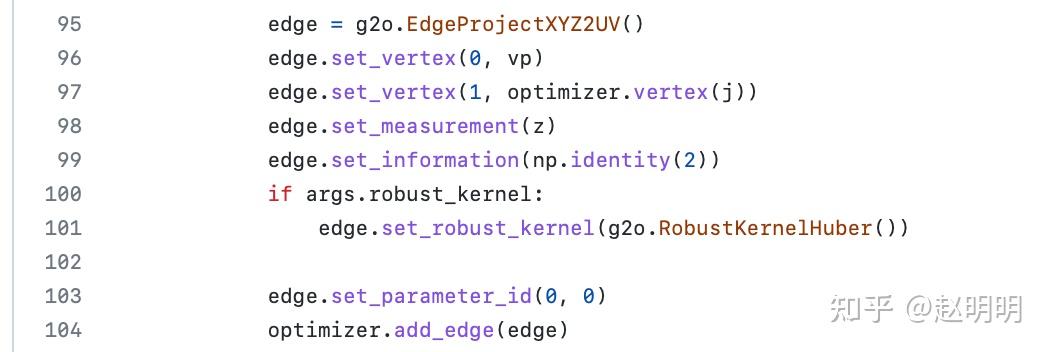
95行,生成一条边edge,边的功能是将3维点映射到图像坐标
96行,将边一个顶点设置为机器人位姿,即待优化求解的第一个量。
97行,将边的另一个顶点设置为三维点,即待求解的第二个量。
98行,将边的测量值设置为z,这个测量值,就是关键点的坐标。
我们用边的一个顶点机器人位姿把 边的另一个顶点:3维点坐标 映射到图片上的p点,计算p距离点z的距离做为误差。
所以z,称为测量值。
我们的目标就是求取合适的顶点值,即求取合适的机器人位姿和3维点,使p距离z点的距离近量接近0。
104行,将边加入到优化器中。

118行,利用算法进行优化,此句运行完,将会得到合适位姿和三维点。
120行至123行,计算投影误差。
也可以把SparseOptimazer直接封装为一个BA类:

其中,add_pose函数:把机器人位姿做为一种顶点;add_point:把三维点做为另一种顶点;add_edge:定义pose顶点和point顶点之间的投影关系,并提供真实二维点的坐标,即用ORB特征求得的关键点的坐标,即measurement, projection的measurement.
C++版本:
这个版本我们直接看ORB_SLAM中的调用方式。
我们看这个源码https://gitee.com/anjiang2020_admin/ORB_SLAM/blob/master/src/Optimizer.cc的第154行,PoseOptimization函数
设置机器人位姿为一种类型的顶点:帧顶点:VertexSE3Expmap,setFixed(false),不固定,可以改变的量。setId(0),顶点编号为0.
设置三维点为另一种类型的顶点:三维点顶点VertexSBAPointXYZ, setFixed(true),固定,三维点坐标不变。setId(I+1),顶点编号为:1,2,3,。。。N
设置三维点为另一种类型的顶点:三维点顶点VertexSBAPointXYZ, setFixed(true),固定,三维点坐标不变。setId(I+1),顶点编号为:1,2,3,。。。N
设置边,边的类型为:映射,即映射三维点的边, EdgeSE3ProjectXYZ
这里固定,就是已知量。不固定对应待优化的量。

213行,把三维点顶点设置为边的0位值顶点。
214行,把帧顶点设置为边的1位值顶点。
215行,把obs设置为边的测量值,即三维点的映射目标点。
Obs则是关键点去畸变后的坐标,如下:

配置完成后,就可以调用optimize(10),来进行优化了。词句写法与python写法一样。
下面,我们看一下PoseOptimizer函数的内是如何使用optimize的。

249行,for循环内使用了4次optimize,分别是optimize(10),optimize(10),optimize(7),optimize(5)
其实使用一次就能够得到机器人位姿了,为什么使用了4次呢?
因为第274行,我们希望优化的停止条件位为:误差小于某个值的边,这类边的数量,刚好小于10.
为了达到这个目的,我们 进行了4次优化,并且这4次优化后,可允许误差从9.210变化到了 5.911.
可允许误差的减小,意味着对优化结果要求越来越严格,满足要求的边的数量会减少。
282行,将最终的优化结果复制给pFrame->mTcw.
2023/12/29 23:39
第一次更新
? 已知目标函数,和约束,使用Ceres来估计最小化目标函数时,变量的取值。
? 本教程适合新手,直接上菜。
目标函数: 约束:
在上述约束下,求目标函数的最小值。
#include <ceres/ceres.h>
struct CostFunctor {
template <typename T>
bool operator()(const T* const x, const T* const y, T* residual) const {
residual[0] = x[0] * x[0] + y[0] * y[0]; // 目标函数 f(x, y)=x^2 + y^2
return true;
}
};
struct InequalityConstraint1 {
template <typename T>
bool operator()(const T* const x, const T* const y, T* residual) const {
// 不等式约束 1 <=x^3 + y^3 + xy <=2
residual[0] = x[0] * x[0] * x[0] + y[0] * y[0] * y[0] + x[0] * y[0] - T(1);
residual[1] = T(2) - (x[0] * x[0] * x[0] + y[0] * y[0] * y[0] + x[0] * y[0]);
return true;
}
};
struct InequalityConstraint2 {
template <typename T>
bool operator()(const T* const x, const T* const y, T* residual) const {
// 不等式约束 1 <=x^2 + y + xy <=2
residual[0] = x[0] * x[0] + y[0] + x[0] * y[0] - T(1);
residual[1] = T(2) - (x[0] * x[0] + y[0] + x[0] * y[0]);
return true;
}
};
struct EqualityConstraint {
template <typename T>
bool operator()(const T* const x, const T* const y, T* residual) const {
// 等式约束 x + y + xy=0
residual[0] = x[0] + y[0] + x[0] * y[0];
return true;
}
};
int main() {
ceres::Problem problem;
double x = 1.5; // 初始值
double y = 0.5; // 初始值
//添加代价函数
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<CostFunctor, 1, 1, 1>(new CostFunctor),
nullptr,
&x, &y
);
// 添加第一个不等式约束
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<InequalityConstraint1, 2, 1, 1>(new InequalityConstraint1),
nullptr,
&x, &y
);
// 添加第二个不等式约束
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<InequalityConstraint2, 2, 1, 1>(new InequalityConstraint2),
nullptr,
&x, &y
);
// 添加等式约束
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<EqualityConstraint, 1, 1, 1>(new EqualityConstraint),
nullptr,
&x, &y
);
ceres::Solver::Options options;
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
std::cout << summary.FullReport() << std::endl;
std::cout << "x: " << x << ", y: " << y << std::endl;
return 0;
}
struct CostFunctor {
template <typename T>
bool operator()(const T* const x, const T* const y, T* residual) const {
residual[0] = x[0] * x[0] + y[0] * y[0]; // 目标函数 f(x, y)=x^2 + y^2
return true;
}
};
c++ template <typename T> 使用模板函数,允许在不同数据类型(double,float)上运行改代码。在 Ceres Solver 中,结构体中的 operator() 函数被设计为返回 bool 类型的原因主要是用于指示残差计算的成功与否。具体来说,operator() 函数应该返回 true 表示成功计算残差,返回 false 表示计算失败。
这种设计的目的是让 Ceres Solver 在优化过程中能够判断是否成功计算了残差。如果返回 false,Ceres Solver 将认为当前优化变量的配置无效,可能会进行回退操作或采取其他策略。如果返回 true,则继续优化过程。
在典型的 Ceres Solver 的用法中,operator() 函数中的计算残差的逻辑往往包括了一些数学计算,而成功与否可能取决于计算是否出现异常或是否满足某些条件。因此,通过返回 bool 类型,可以在计算中传递成功或失败的信息给 Ceres Solver。 ```
struct InequalityConstraint1 {
template <typename T>
bool operator()(const T* const x, const T* const y, T* residual) const {
// 不等式约束 1 <=x^3 + y^3 + xy <=2
residual[0] = x[0] * x[0] * x[0] + y[0] * y[0] * y[0] + x[0] * y[0] - T(1);
residual[1] = T(2) - (x[0] * x[0] * x[0] + y[0] * y[0] * y[0] + x[0] * y[0]);
return true;
}
};
residual[0] = x[0] * x[0] * x[0] + y[0] * y[0] * y[0] + x[0] * y[0] - T(1);
在这里,T(1) 表示一个常数 1,而 T(2) 表示一个常数 2。
关于 residual[0] 的形式,它是不等式约束条件的表示。在这个例子中,不等式约束是:
1 <= x^3 + y^3 + xy <= 2,而 residual[0] 的设置是为了将这个不等式约束转化为优化问题的残差。
具体而言,residual[0] 表达的是不等式的左边 x^3 + y^3 + xy - 1,这样在优化的过程中,通过最小化这个残差,可以使得不等式约束得到满足。
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<CostFunctor, 1, 1, 1>(new CostFunctor),
nullptr,
&x, &y
);
c++ ceres::AutoDiffCostFunction 是 Ceres Solver 中用于自动求导的类。C++ <CostFunctor, 1, 1, 1> CostFunctor:指定了代价函数的类型。 1,1,1: 1:表示代价函数的残差维度。在这个例子中,代价函数产生的残差是一个维度为 1 的标量值。 1:表示第一个参数块的大小。在这个例子中,第一个参数块是变量 x,它是一个维度为 1 的标量。 1:表示第二个参数块的大小。在这个例子中,第二个参数块是变量 y,它是一个维度为 1 的标量。c++ nullptr 默认就行,此处实际默认代价函数f(x)=x;初学者不用管。c++ &x, &y &x 和 &y 是指向变量 x 和 y 的指针,它们将成为优化的参数ceres::Solver::Options options;
linear_solver_type:线性求解器的类型,默认为 ceres::DENSE_QR。这个选项指定了在每次迭代中如何求解线性系统。
minimizer_type:最小化器的类型,默认为 ceres::TRUST_REGION. 这个选项指定了用于实现最小化的算法,例如 Levenberg-Marquardt 或 Dogleg。
trust_region_strategy_type:信赖域策略的类型,默认为 ceres::LEVENBERG_MARQUARDT。 这个选项定义了在优化中如何动态调整信赖域的策略。num_threads:用于求解器的线程数,默认为 1。 指定在求解器中使用的线程数量,以加速优化过程。max_num_iterations:最大迭代次数,默认为 50。 指定优化的最大迭代次数,以避免无限迭代。parameter_tolerance:参数变化的容忍度,默认为 1e-8。 如果参数的变化小于此容忍度,认为已经收敛。function_tolerance:目标函数变化的容忍度,默认为 1e-6。 如果目标函数的变化小于此容忍度,认为已经收敛。gradient_tolerance:梯度范数的容忍度,默认为 1e-10。 如果梯度的范数小于此容忍度,认为已经收敛。ceres::Solver::Summary summary;
ceres::Solver::Summary 是 Ceres Solver 在求解器运行完毕后生成的一个结构体,包含了求解过程的各种信息和统计数据。以下是一些主要的成员和其含义:brief_report: 一个字符串,提供了对求解结果的简要描述,包括收敛状态、耗时等信息。initial_cost: 初始代价函数值。final_cost: 求解器运行结束后的代价函数值。iterations: 求解过程中迭代的次数。num_successful_steps: 成功步骤的数量。num_unsuccessful_steps: 未成功步骤的数量。num_inner_iteration_steps: 内部迭代步骤的数量。time_in_seconds: 求解器运行的总时间(秒)。linear_solver_type_used: 使用的线性求解器类型。preconditioner_type_used: 使用的预条件器类型。final_gradient_max_norm: 求解结束时的梯度最大范数。final_step_norm: 求解结束时的步长范数。ceres::Solve(options, &problem, &summary);
options: 这是一个 ceres::Solver::Options 类型的对象,其中包含了求解器的各种配置选项。你可以在这里设置迭代次数、终止条件、线性求解器类型等参数,以调整求解过程的行为。&problem: 这是你构建的最小二乘问题的实例,即 ceres::Problem 类型的对象。它包含了代价函数、变量参数等信息,描述了你要优化的目标函数。&summary: 这是一个 ceres::Solver::Summary 类型的对象,用于存储求解的结果摘要信息。在函数调用后,&summary 中将包含有关求解过程的统计信息,例如迭代次数、最终代价函数值、优化参数的最终值等。






 扫一扫 关注我们
扫一扫 关注我们